2021年4月自考机电一体化系统设计02245真题与答案
摘要:2021年4月份真题试卷已经公布,希赛网自考频道正在陆续发布,本文提供2021年4月自考机电一体化系统设计02245真题与答案,供各位考生参考。
对于参加2021年10月自考的考生来说,2021年4月自考真题的参考价值最高,下文是希赛自考频道整理的2021年4月自考机电一体化系统设计02245真题与答案,想要查看更多自考真题,可以选择【自考历年真题】【2021年自考真题汇总】【自考题库app下载】。
2021年4月自考机电一体化系统设计02245真题与答案
注意事项:
1.本试卷分为两部分,第一部分为选择题,第二部分为非选择题。
2.应考者必须按试题顺序在答题卡(纸)指定位置上作答,答在试卷.上无效。
3.涂写部分、画图部分必须使用2B铅笔,书写部分必须使用黑色字迹签字笔。
一、单项选择题:本大题共10小题,每小题1分,共10分。在每小题列出的备选项中只有一项是最符合题目要求的,请将其选出。
1.受控变量是机械位置、速度及加速度的- -种反馈控制系统为
A.数控机床
B.伺服系统
C.顺序控制系统
D.自动导引车系统
2.已知双波谐波齿轮的刚轮齿数为198.柔轮齿数为200,当刚轮固定,波发生器输入,柔轮输出时,传动比应为
A. 0.01
B.98
C. 100
D. 101
3.齿轮副的间隙会造成齿轮传动的回差,属于柔性消隙法的结构是
A.压簧消隙结构
B.调整中心距法
C.斜齿轮法
D.选择装配法
4.传感器和测量系统的量程由可检测变量值的
A.上限定义
B.下限定义
C.下限和上限定义
D.下限或上限定义
5.在PWM放大器中,同一桥臂.上的两个晶体管多工作在
A.导通状态
B.关断状态
C.反相状态
D.同相状态
6.三相反应式步进电动机定子的磁极个数是
A.3
B.6
C.9
D.12
7.永磁式步进电机的步距角较大,一般为
A.3° ~6°
B.5°~16°
C.7.5° ~ 18°
D.9.5° ~ 20°
8. PID 控制器中,P的作用是
A.降低系统稳态误差
B.提高系统无静差度
C.减小系统阻尼
D.提高系统稳定性
9. A+ A=l是基本定律中的
A.补定理
B.重复定理
C.吸收律
D.分配律
10. OMRONC系列PLC的文字符号CMP是表示
A.定时器
B.比较器
C.计数器
D.乘法器
二、填空题:本大题共10小题,每小题1分,共10分。
11.工业机器人主要组成部件为主体结构、终端和_______
12.机电一体化系统中测量模块输入参数是确定_______模块性能的物理变量。
13. 机械传动主要有_______传动、蜗杆传动、丝杠螺母传动和谐波传动。
14.在机电一体化系统中,被测量主要是一些_____量, 如位移、 速度、加速度、力(转矩)等。
15.永磁同步电动机以________换向取代了传统直流电动机的电刷换向。
16.反应式步进电机的转子齿数越多,则步距角越______
17. 为了避免步进电机振荡,一般要使阻尼______
18.伺服系统输出轴的单位位置误差所能承受的负载转矩定义为伺服系统的_
19.对于机电一体化系统,理想的______ 指令生成是非常重要的。它常常代表一个系统的“智能”水平。
20. OMRONC 系列PLC中KEEP表示______指令。
三、简答题:本大题共6小题,每小题5分,共30分。
21.滚珠丝杠螺母副常用的间隙消除及预紧方法有哪些?
22.采用差动技术能够改善传感器的哪些性能?
23.直流伺服电动机通常可近似为一阶惯性环节,其过渡过程的快慢主要取决于机电时间常数,根据机电时间常数的定义,可从哪几个方面减小机电时间常数?
24.简述什么是步进电动机DDA运动控制方法。
25.点位控制的功能是什么?点位控制为什么对运动路径没有要求?
26.简述OMRON C系列PLC中计数器进行计数的工作过程。
四、简单应用题:本大题共5小题,每小题6分,共30分。
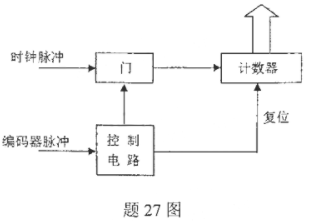
27.题27图为采用增量编码器测电动机转速的方案示意图。增量编码器每转500条刻线,时钟脉冲为8MHz,设电机在某转速下运行时,两个编码脉冲间隔的时间为1ms。
试求:(1)电机的转速。
(2)两个编码脉冲间隔的时间里计数器能够计多少个时钟脉冲?
28.某三相交流感应电动机极对数为2,电源频率为50Hz。试求:
(1) 电动机的同步转速:
(2)转差率为0.05时所对应的转速;
(3)起动瞬间(转速为0)时所对应的转差率。
29.已知步进电动机相电流接通顺序为A-AB-B-BC-C-CA-A,其转子齿数为60。试求: .
(1)步距角θs
(2)裕量角θr
(3)当电动机的转速为10r/min时,输入频率为多少?
30.在x-y平面内由(1, 1)点以速度2的恒速运动到(7, 9)点,所推导出的两点间

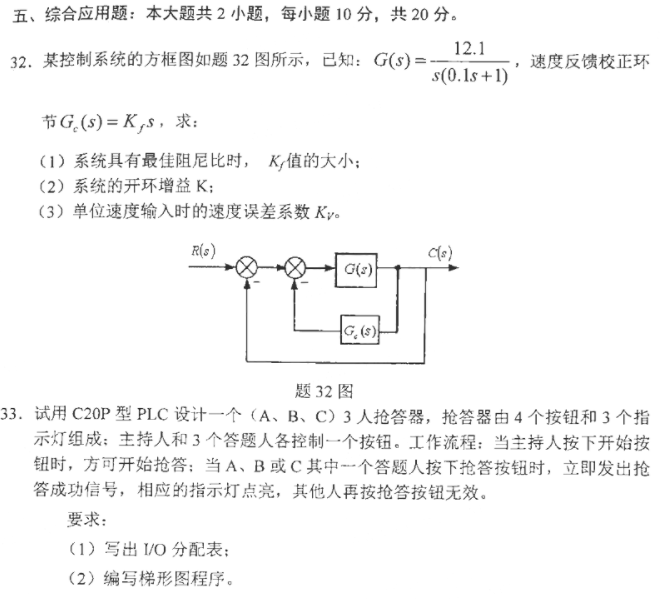
![5-120601152050[1].gif](https://img.ycpai.cn/images/xs_cms/2020-12/337/hQw5r9DYan.gif)
延伸阅读
- 2024年上半年吉林省高等教育自学考试的招生政策信息汇总
- 24年上半年吉林省自考的理论课程考试通知单打印官网是?
- 24年4月吉林省自考的理论课程考试通知单打印时间是何时?
- 2024年上半年吉林省自考报名时上传考生照片要求是?
- 24年4月吉林省自考理论课程的报名流程是?实践性环节考核呢?
- 2024年上半年吉林省自考的报名费用收费标准是?缴费方式是?

自考微信公众号

扫码添加
自考备考资料免费领取
去领取
距离2024 自考考试
还有- 0
- 0
- 0






 扫描二维码
扫描二维码








