题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如图所示的系统,假设系统输入信号的斜坡输入xi(t)=at(式中a是一个任意常数,t≥0),试证明通过适当调节Ki的值,
如图所示的系统,假设系统输入信号的斜坡输入xi(t)=at(式中a是一个任意常数,t≥0),试证明通过适当调节Ki的值,该系统对斜坡输入相应的稳态误差能达到零。

 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
如图所示的系统,假设系统输入信号的斜坡输入xi(t)=at(式中a是一个任意常数,t≥0),试证明通过适当调节Ki的值,该系统对斜坡输入相应的稳态误差能达到零。
答案
 更多“如图所示的系统,假设系统输入信号的斜坡输入xi(t)=at(式中a是一个任意常数,t≥0),试证明通过适当调节Ki的值,”相关的问题
更多“如图所示的系统,假设系统输入信号的斜坡输入xi(t)=at(式中a是一个任意常数,t≥0),试证明通过适当调节Ki的值,”相关的问题
第1题
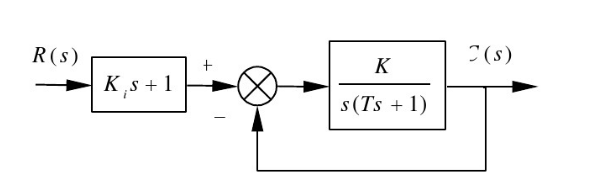
随动控制系统的方框图如图所示。若输入信号为r(t)=at(a为任意常数)。试证明通过适当地调节Ki的值,该系统对于斜坡输入的响应的稳态误差能达到零。
第2题
控制系统结构如图3-19所示,误差E(s)=R(s)-C(s)。没输入信号为r(t)=at,其中a为任意正常数,试证明适当选择的Ki值,可使系统对斜坡输入的稳态误差为零。已知系统参数K,T,Ki均为正常数。

第3题
速度控制系统如图所示。输入信号r(t)和扰动信号d(t)都是单位斜坡函数。为了消除系统在输出端的稳态误差,使斜坡输入信号通过比例一微分元件后再进入系统。

(1)试计算Kd=0时,系统的稳态误差。 (2)欲使系统对斜坡输入的响应的稳态误差为零,Kd应为何值?
第4题
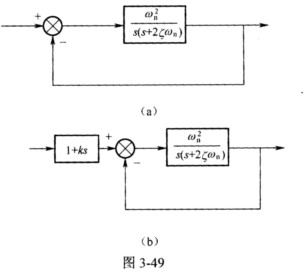
(电子科技大学2005年硕士研究生入学考试试题)如图3.49(a)所示的系统,对单位斜坡输入信号的稳态误差为
 。
。
 试证明当斜坡输入信号通过PD滤波器加进系统时,如图3-49(b)所示,系统跟踪该斜坡信号的稳态误差可以消除。图中参数均已适当设定。
试证明当斜坡输入信号通过PD滤波器加进系统时,如图3-49(b)所示,系统跟踪该斜坡信号的稳态误差可以消除。图中参数均已适当设定。
第6题
已知闭环传递函数的一般形式为:
 误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为:
误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为:
 (2)系统在斜坡信号输入下,稳态误差为零的充分条件为:
(2)系统在斜坡信号输入下,稳态误差为零的充分条件为:
 (3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。
(3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。
第7题
采样系统的结构如下图所示,采样周期T=1s。
当输入信号r(t)=t时,试证明系统稳态误差为

第8题
已知稳定的单位负反馈控制系统的闭环传递函数为
试证明:系统在单位斜坡输入下的稳态误差ess=0的条件为a0=b0,a1=b1。
第9题
已知闭环传递函数的一般形式为

误差定义为e(t)=r(t)-c(t),试证:
(1) 系统在阶跃信号输入下,稳态误差为零的充分条件为
(2) 系统在斜坡信号输入下,稳态误差为零的充分条件为
(3)推导系统在斜坡信号输入下稳态误差为零的充分条件;
(4)求出系统闭环传递函数与系统型别之间的关系。
第10题
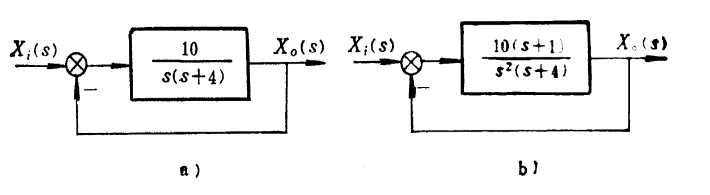
已知两个系统如图所示,当系统输入信号为xi(t)=4+6t+3t2时,试分别求出两个系统的稳态误差。