题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
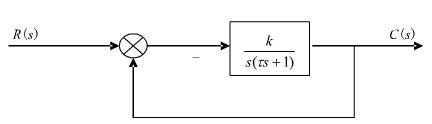
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
答案
 更多“有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函”相关的问题
更多“有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函”相关的问题
第1题
一单位反馈系统的开环传递函数为 ,已知系统的输入Xr(t)=1(t),误差时间函数为e(t)=1.4e-1.07t-0.4e-3.74t,求系统的阻尼比ζ,自然振荡角频率ωn,系统的闭环传递函数及系统的稳态误差。
,已知系统的输入Xr(t)=1(t),误差时间函数为e(t)=1.4e-1.07t-0.4e-3.74t,求系统的阻尼比ζ,自然振荡角频率ωn,系统的闭环传递函数及系统的稳态误差。
第2题
如图4-41所示系统。试绘制k从0→+∞变化时系统的根轨迹;利用根轨迹分析k对系统动态特性的影响;并求系统的最小阻尼比和当k=2时系统的闭环极点。

第3题
某随动控制系统结构如图3-9所示。已知K1=40V/rad,K2=0.5rad/(V·s),T=0.2s,τ=2V/rad。试求:
(1)加入速度反馈前后闭环系统动态性能指标(调节时间和超调量);
(2)为使加入速度反馈后的闭环系统出现临界阻尼的非振荡阶跃响应,τ应取何值?

第5题
已知某单位反馈系统的开环传递函数为
(1)画出系统的根轨迹图;
(2)求系统稳定时开环增益K的取值范围;
(3)求当系统阻尼比ζ=0.707时闭环的极点,并写出相应的传递函数。
第6题
一单位反馈系统的开环传递函数为 ,求:
,求:
(1)系统的单位阶跃响应及动态性能指标σ%,ts和tp;
(2)输入量为单位脉冲函数时系统的输出响应。
第7题
已知单位负反馈系统开环传函为 ,计算系统的阻尼比ε、无阻尼自振荡角频率ωn及超调量与调节时间tt(5%)。
,计算系统的阻尼比ε、无阻尼自振荡角频率ωn及超调量与调节时间tt(5%)。
第8题
 试求: (1)绘制根轨迹并证明复平面上根轨迹部分为圆。 (2)系统呈现欠阻尼状态时的开环增益范围。 (3)系统最小阻尼比时的闭环极点。
试求: (1)绘制根轨迹并证明复平面上根轨迹部分为圆。 (2)系统呈现欠阻尼状态时的开环增益范围。 (3)系统最小阻尼比时的闭环极点。
第9题
单位负反馈系统的开环传递函数为 ,
,
系统的误差为e(t)=1.4e-1.07t-0.4e-3.73t,求系统的稳态误差ess(∞)和阻尼比ξ、无阻尼振荡角频率ωn。