更多“对不能观测的系统状态可以设计降维观测器对其观测。()”相关的问题
更多“对不能观测的系统状态可以设计降维观测器对其观测。()”相关的问题
第1题
对不能观测的系统状态可以设计全维观测器对其观测()
点击查看答案
第2题
系统的状态观测器存在的充分必要条件是:系统能观测,或者系统虽然不能观测,但是其不能观测的子系统的特征值具有负实部()
点击查看答案
第3题
通过全维状态观测器引入状态反馈来任意配置系统的闭环极点时,要求系统必须同时可控和可观测()
点击查看答案
第4题
降维观测器设计时,原系统初始状态为3,反馈矩阵增益为6,要使观测误差为零,则观测器的初始状态应为()
点击查看答案
第5题
为一个n阶系统设计一个观测器,维数与受控系统维数相同的称为全维观测器.若系统有输出矩阵秩为m,那么()个状态分量可以用降维观测器进行重构。()
点击查看答案
第6题
给定系统的状态空间表达式为 y=[0 1]x 设计一全维状态观测器,并使观测器的极点为-10。
给定系统的状态空间表达式为
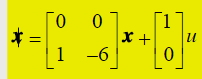 y=[0 1]x
y=[0 1]x
设计一全维状态观测器,并使观测器的极点为-10。
点击查看答案
第7题
对于一个n维的线性定常连续系统,若其完全能观,则利用状态观测器实现的状态反馈闭环系统是2n维的()
点击查看答案
第8题
与原系统维数一样的观测器被称为 ()
A.满维观测器
B.全维观测器
C.降维观测器
D.等维观测器
点击查看答案
第9题
通过状态反馈进行任意配置闭环极点的充要条件是,其受控对象是( )
A.能控的
B.能控且能观测的
C.能观测的
D.不能观测的
点击查看答案
第10题
对线性定常系统基于观测器构成的状态反馈系统和状态直接反馈系统,它们的传递函数矩阵是相同的()
点击查看答案


 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
 答案
答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
拍照、语音搜题,请扫码下载APP