题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)位置随动系统如图3-44所示。其中K(s
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)位置随动系统如图3-44所示。其中K(s)为控制器。
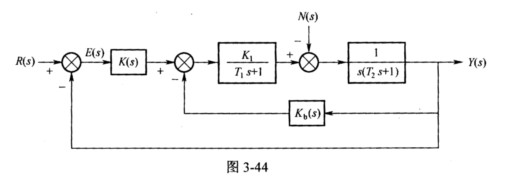 (1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)
(1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)
 答案
答案
查看答案

 。
。 试证明当斜坡输入信号通过PD滤波器加进系统时,如图3-49(b)所示,系统跟踪该斜坡信号的稳态误差可以消除。图中参数均已适当设定。
试证明当斜坡输入信号通过PD滤波器加进系统时,如图3-49(b)所示,系统跟踪该斜坡信号的稳态误差可以消除。图中参数均已适当设定。 (1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。
(1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。
 误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为:
误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为: (2)系统在斜坡信号输入下,稳态误差为零的充分条件为:
(2)系统在斜坡信号输入下,稳态误差为零的充分条件为: (3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。
(3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。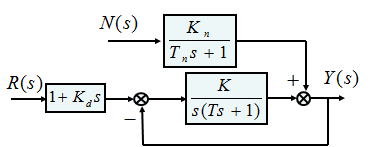
 试求: (1)确定系统在输入信号r(t)=l(t)作用下的调节时间ts。 (2)当r(t)=2cos(t+15°),求此时系统的稳态误差ess(t)。
试求: (1)确定系统在输入信号r(t)=l(t)作用下的调节时间ts。 (2)当r(t)=2cos(t+15°),求此时系统的稳态误差ess(t)。

 ,已知在正弦输入信号r(t)=sin 2t作用下,系统的稳态输出为
,已知在正弦输入信号r(t)=sin 2t作用下,系统的稳态输出为 ,试确定该系统单位阶跃响应的超调量与调整时间。
,试确定该系统单位阶跃响应的超调量与调整时间。