题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数
已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数Kv,并确定当输入信号分别为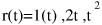 和1+2t+t2时系统的稳态误差ess
和1+2t+t2时系统的稳态误差ess

 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数Kv,并确定当输入信号分别为和1+2t+t2时系统的稳态误差ess
答案
 更多“已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数”相关的问题
更多“已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数”相关的问题
第1题
已知单位反馈控制系统的开环传递函数如下。
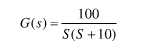
试求各系统的静态位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka,并确定当输入信号分别为r(t)=ε(t)、2t、t2和1+2t+t2时系统的稳态误差ess。
第2题
已知控制系统结构图如下所示

(1)分析说明内反馈Kfs的存在对稳定性的影响
(2)计算系统的静态位置误差系数、静态速度误差系数和静态加速度误差系数,并说明内反馈的存在对系统稳态误差的影响
第3题
 。
。
试求位置误差系数Kp,速度误差系数Kv,加速度误差系数Ka。
第4题
已知单位负反馈控制系统的开环传递函数如下。试求其静态位置、速度和加速度误差系数,并求当输入信号为(a)r(t)=1(t);(b)r(t)=2t;(c)r(t)=t2;(d)r(t)=1+2t+t2时系统的稳态误差。
第5题
单位反馈系统的开环传递函数为G(s)=100/(0.1s+1)(s+5)。
(1)求各静态误差系数和r(t)=1+2t+0.5t2时的稳态误差ess;
(2)当输入作用10s时的动态误差是多少?
第6题
已知单位反馈控制系统的开环传递函数如下:

试求输入分别为r(t)=2t和r(t)=2+2t+t2时,系统的稳态误差ess。
第7题
要求校正后系统的静态速度误差系数Kv≥8rad/s,相角裕度γ≥40°,试设计串联校正装置。
第8题
若要求使系统的速度误差系数Kv=100,相位裕量γ≥45°,剪切频率不低于65rad·s-1,试设计系统的校正装置。
第9题
若要求校正后系统的稳态速度误差系数Kv≥100,相位裕量γ≥50°,试确定串联超前校正装置。