题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某系统的结构图如图4-47所示。 试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳
某系统的结构图如图4-47所示。
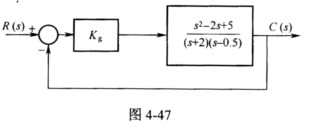 试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳定的Kg值的范围。 (3)用根轨迹法确定使系统的阶跃响应不出现超调的Kg的最大取值。
试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳定的Kg值的范围。 (3)用根轨迹法确定使系统的阶跃响应不出现超调的Kg的最大取值。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
某系统的结构图如图4-47所示。
试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳定的Kg值的范围。 (3)用根轨迹法确定使系统的阶跃响应不出现超调的Kg的最大取值。
答案
 更多“某系统的结构图如图4-47所示。 试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳”相关的问题
更多“某系统的结构图如图4-47所示。 试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳”相关的问题
第1题
已知单位反馈系统的开环传递函数为

(1)画出系统的根轨迹草图(其中根轨迹在实轴上的分离点,根轨迹与虚轴的交点要精确算出);
(2)用根轨迹法确定使系统的阶跃响应不出现超调时K的取值范围;
(3)为使系统的根轨迹通过-1±j1两点,拟加入串联微分校正装置(τs+1),试确定τ的取值。
第2题
某带局部反馈控制系统的结构图如图4-2所示。试绘制参变量K*由0→∞时的根轨迹图,并确定使系统稳定的K*值变化范围。

第4题
已知系统的开环传递函数为 ,试绘制系统的根轨迹图,并确定使闭环系统稳定的开环增益K值范围。
,试绘制系统的根轨迹图,并确定使闭环系统稳定的开环增益K值范围。
第5题
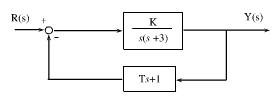
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
第6题
(1)画出当K由0→∞变化时,闭环系统的根轨迹;
(2)用根轨迹法确定,使系统具有阻尼ζ=0.5(对一对复数闭环极点而言)时K的取值以及闭环极点的取值;
(3)用根轨迹法确定,系统在单位阶跃信号作用下,稳定控制精度的允许值。

第7题
已知系统的特征方程为
D(s)=s3+3s2+Ks+Ka=0
当K从0→+∞变化,a取不同的值时,系统的根轨迹也不同。试分别确定使根轨迹具有一个、两个和没有实数分离点(s=0除外)时的a值的范围,并绘制其根轨迹图。
第8题
设单位负反馈系统的开环传递函数如下:
 (1)绘制系统准确的根轨迹图;
(1)绘制系统准确的根轨迹图;
(2)确定使系统临界稳定的开环增益Kc的值;
(3)确定与系统临界阻尼比相应的开环增益K。
第9题
(1)画出系统的根轨迹图;
(2)求出使闭环系统稳定的K值范围;
(3)求出K=10时系统的闭环极点和单位阶跃响应,并说明此时单位的阶跃响应是否有超调。若有超调量是多少?