题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
对n阶单输入-单输出系统(A,b,c,d),已知 cAn-1b=α≠0,cAkb=0 (k=0,1,2,…,n-2) 试证该系统是既能控又能观的。
对n阶单输入-单输出系统(A,b,c,d),已知
cAn-1b=α≠0,cAkb=0 (k=0,1,2,…,n-2)
试证该系统是既能控又能观的。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
对n阶单输入-单输出系统(A,b,c,d),已知
cAn-1b=α≠0,cAkb=0 (k=0,1,2,…,n-2)
试证该系统是既能控又能观的。
答案
 更多“对n阶单输入-单输出系统(A,b,c,d),已知 cAn-1b=α≠0,cAkb=0 (k=0,1,2,…,n-2) 试证该系统是既能控又能观的。”相关的问题
更多“对n阶单输入-单输出系统(A,b,c,d),已知 cAn-1b=α≠0,cAkb=0 (k=0,1,2,…,n-2) 试证该系统是既能控又能观的。”相关的问题
第1题
对n维线性定常单输入-单输出系统:
 (1)已知cAib=0,(i=1,2,…,n-2),但cAn-1b≠0,试证明该系统是既能控又能观的。 (2)证明该系统的传递函数是:
(1)已知cAib=0,(i=1,2,…,n-2),但cAn-1b≠0,试证明该系统是既能控又能观的。 (2)证明该系统的传递函数是:

第2题
对线性定常系统,证明:线性变换不改变系统的渐近稳定性。 (2)对单输入-单输出线性定常系统{A,b,c),证明:若{A,b}能控,则一定存在行向量c,使{A,c}能观。
第3题
A.改变系统的能控性
B.改变系统的能观性
C.改变系统的极点
D.改变系统的零点
第5题
己知单输入-单输出系统的传递函数为:
 (1)给出该传递函数的一个能控标准型实现[输入u、输出y、状态x]。 (2)上述能控标准型系统引入状态反馈u=y+kx后,问: 1)闭环系统(输入v、输出y、状态x)是否一定能控;若是,请给出证明;若否,给出一个尽可能简单的反例。 2)闭环系统(输入v、输出y、状态x)是否一定能观;若是,请给出证明;若否,给出一个尽可能简单的反例。 注:上述“尽可能简单”是指闭环系统的传送函数阶数最低,且静态增益为1。要求求出k及相应的闭环传递函数Ga(s)。
(1)给出该传递函数的一个能控标准型实现[输入u、输出y、状态x]。 (2)上述能控标准型系统引入状态反馈u=y+kx后,问: 1)闭环系统(输入v、输出y、状态x)是否一定能控;若是,请给出证明;若否,给出一个尽可能简单的反例。 2)闭环系统(输入v、输出y、状态x)是否一定能观;若是,请给出证明;若否,给出一个尽可能简单的反例。 注:上述“尽可能简单”是指闭环系统的传送函数阶数最低,且静态增益为1。要求求出k及相应的闭环传递函数Ga(s)。
第6题
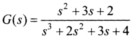
已知单输入-单输出控制系统的传递函数为
第7题
已知单输入一单输出定常系统的微分方程为
 试求:
试求:
(1)建立此系统状态空间模型的对角线标准型。
(2)根据所建立的对角线标准型求系统的传递函数(要求列出计算步骤)。
第8题
已知系统的状态空间表达式为
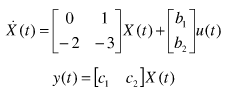
欲使系统中有一个状态既能控又能观测,另一个状态既不能控又不能观测,试确定b1,b2和c1,c2应满足的关系。